This tutorial is a bit more of an extended guide on the general command framework included in WPILib.
As always, if at any point you have questions or need help, ask in #sw_general
on Slack!
General Overview
The WPILib command framework (WCF) is composed of a few very simple
components: Subsystem, Command, CommandGroup, and Scheduler.
Changes for 2020+
The 2020+ versions of WPILib have a slightly changed structure from the descriptions given throughout this tutorial, but are generally similar. The main important changes relevant to this guide (and part II) are as listed below:
Command,Subsystem, andCommandGroupare now interfaces, meaning that you'll need to useCommandBase,SubsystemBase, andCommandGroupBaseto implement them effectively.Scheduleris nowCommandSchedulerand has an access ofCommandScheduler.getInstance().run()instead ofScheduler.run()- Using
require(Subsystem... subsytems)has been renamed toaddRequirements(Subsystem... subsytems)
Subsystem
The Subsystem class represents our mechanisms to the WCF.
"Mechanisms" are concepts like the drive train, arm, pistons,
turrets, and lights. Basically, if it can be controlled, it is
part of a Subsystem.
For example: In the code, our DriveTrain class would extend Subsystem.
Scheduler
The Scheduler class is responsible for tracking the commands that
are currently running and the systems that are in use. You rarely
need to call anything but Scheduler.run(), since everything else
happens in other classes, or references Scheduler internally.
Command
The Command class is the base for running our own code in the WCF.
It is the only way to execute any code under the Scheduler, and
offers a variety of different choices on when to run your code.
It also offers timekeeping mechanisms, which are useful for tracking
timeouts.
Command can also keep track of what Subsystems are used by the
command, to prevent dangerous conflicts between commands.
CommandGroup
The CommandGroup class is a specialized Command that allows you
to run multiple commands in a sequence. This is useful for designing
autonomous routines, since each part of the auto can be a single
Command.
Example
The command system can be a bit much to understand. The best way to learn how it works is by example.
(Note: These examples will use green for any Command, orange for
any CommandGroup, and blue for the dependencies / subsystems.)
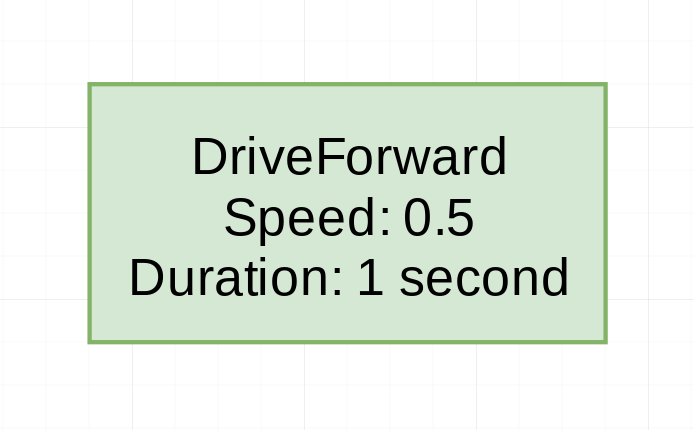
We'll start with a simple driving
command, DriveForward. This command simply sets the power to
whatever we want, for as much time as we specify:
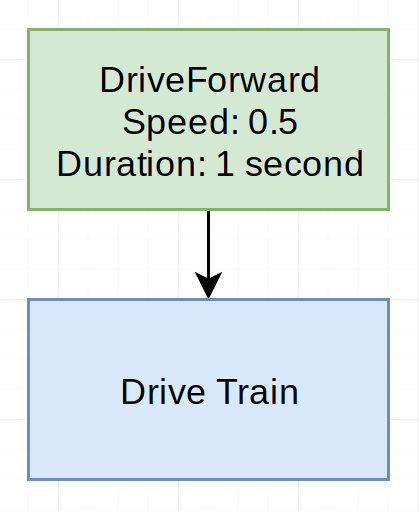
This DriveForward isn't quite complete though. In order to
move, the command will call setPower on our DriveTrain
class. However, if we were to run another command that also
used DriveTrain, it would be crazy! The wheels would flip
between two different powers multiple times per second, and
if it were a different mechanism it could cause severe damage.
To prevent this from happening, the Command class has the
requires(Subsystem) method. If we pass the DriveTrain to
this method, we will prevent any other command from running
at the same time. We will represent that like this:
Now we have a complete command! The next thing we want to do is build
an autonomous routine with a few commands. Imagine we add a few more
commands, Rotate -- rotates the robot clockwise the given number of
degrees, and SetArmPosition -- sets the position of the arm to a
certain location. We want the robot go forwards a little bit,
rotate, move forwards some more, and then put the arm straight up,
at 90 degrees. Here's the Command visual:
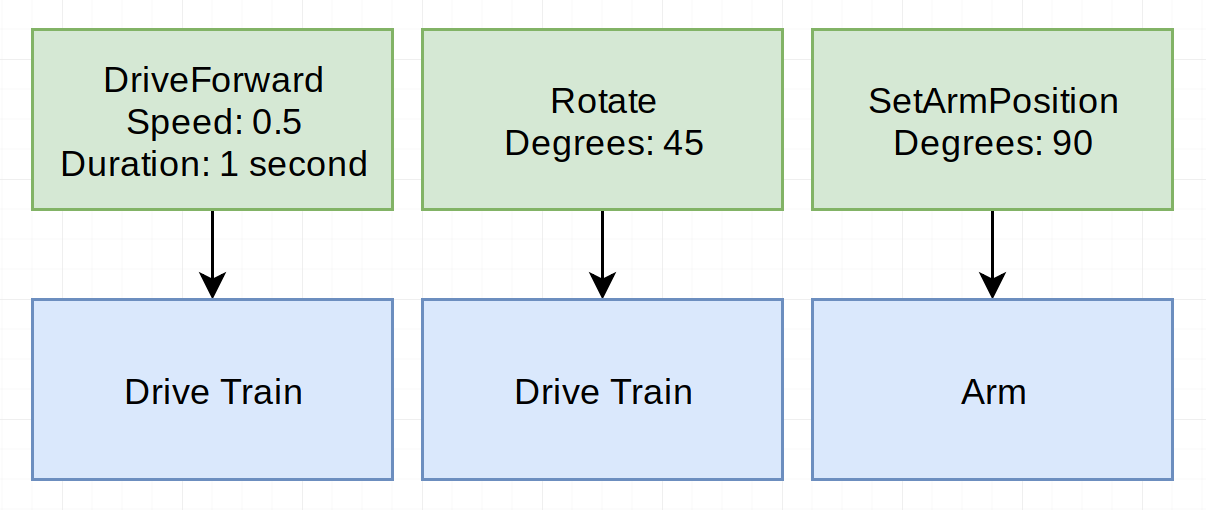
Note how the Rotate command relies on the DriveTrain still --
it uses the wheels to rotate the robot. But the SetArmPosition
command just relies on the Arm, because it doesn't touch the wheels.
We have just one problem -- we can't add all of these commands to the
Scheduler and just let it go, because they would all run at the
same time (except for DriveForward and Rotate, because they both
use the DriveTrain!). We need some way to say "wait until this
command finishes before starting the next one". Enter CommandGroup.
This class allows us to define a sequence of commands to run that
will wait for the previous ones to finish. Here is the visual:
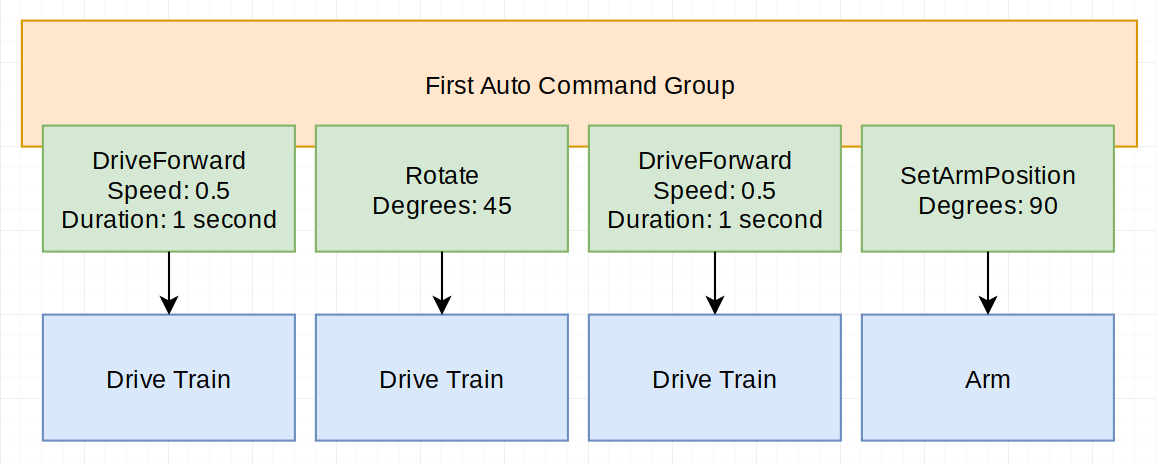
Notice that one of the commands was duplicated, because we wanted to drive forward twice for this auto.
If you read the General Overview section above, then you know that
a CommandGroup is also a Command. That means that it also can
require subsystems like the DriveTrain and Arm. How does a
CommandGroup decide what it's requirements are? By looking at the
Commands inside of it. If we represented the entire auto as one
Command, it would look like this:
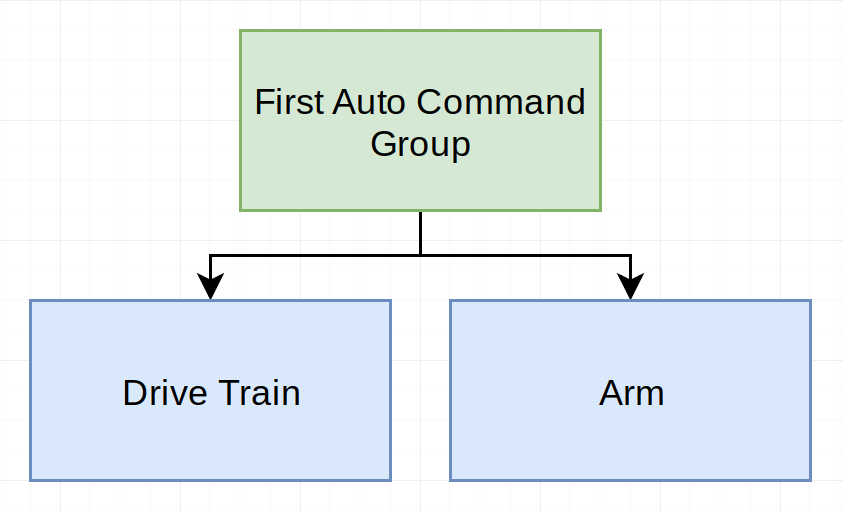
Notice that it requires both the DriveTrain and the Arm. This is
because the commands it contains require both of those as well. This
auto routine would not allow any other command that uses the DriveTrain
or Arm to run, except for the "child" commands that it contains.
(For example, if we used a command to take input from the joysticks and drive the robot, it could not run at the same time as this auto.)
This concludes the general introduction to the WCF. In the next part, I'll go over how these diagrams convert to code.